robot
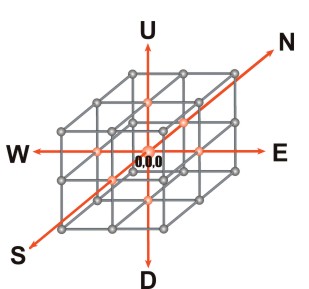
NASA a elaborat un nou model de robot pentru lucrari în modulele unei statii orbitale. Pentru a identifica modulele statiei orbitale, NASA a definit un sistem de coordonate. In fiecare punct de coordonate intregi exista un modul al statiei orbitale, iar oricare statie este unita cu cele 6 statii invecinate prin tunele de lungime 1. Mai exact, statia din punctul de coordonate (x, y, z) este unita printr-un tunel cu statia din punctul de coordonate (x+1,y,z), printr-un alt tunel cu (x-1,y,z), respectiv cu (x,y+1,z), (x,y-1,z), (x,y,z+1) si (x,y,z-1).
Pentru deplasarea robotului
se pot scrie algoritmi in care pot fi utilizate 6 instructiuni: N, S, E, V,
U, D. Efectul celor 6 instructiuni este:
N: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x,y+1,z)
S: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x,y-1,z)
E: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x+1,y,z)
V: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x-1,y,z)
U: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x,y,z+1)
D: robotul de deplaseaza
din pozitia (x,y,z) in pozitia (x,y,z-1).
Evident, intr-un algoritm
instructiunile se pot repeta. Dupa executarea tuturor instructiunilor din algoritm,
robotul se opreste.
Initial robotul se afla în modulul cu coordonatele (0, 0, 0).
Cerinta
Scrieti un program care
determina numarul total de algoritmi, care contin exact K
instructiuni si care deplaseaza robotul din punctul initial cu coordonatele
(0, 0,
0) în punctul final cu
coordonatele (X, Y,
Z).
Date
de intrare
Pe prima linie a fisierului
de intrare robot.in sunt inscrise
numerele întregi K, X,
Y si Z,
separate prin cate un spatiu, avand semnificatia din enunt.
Date de
iesire
Fisierul de iesire robot.out va contine o singura linie pe care va fi scris un numar natural reprezentand numarul algoritmilor formati din exact K instructiuni, care deplaseaza robotul din punctul initial cu coordonatele (0, 0, 0) în punctul final cu coordonatele (X,Y,Z).
Restrictii
0<=K<=11
|X|,|Y|,|Z| <=11
Exemple
| robot.in | robot.out | robot.in | robot.out | robot.in | robot.out | robot.in | robot.out |
| 5 3 0 0 | 45 | 2 -1 -1 0 | 2 | 10 3 3 2 | 42000 |
3 0 4 0 |
0 |
Timp maxim de executie/test: 0.1 secunde
prof. Sergiu Corlat
Liceul Moldo-Turc Chisinau
Contact:scorlat@gmail.com